
הרובוט שבו השתמשנו נקרא
DARwIn-OP. הרובוט פותח
באוניברסיטת פנסילבניה
שבארה"ב, ושווק באופן מסחרי ע"י חברה קוריאנית בשם
ROBOTIS
.
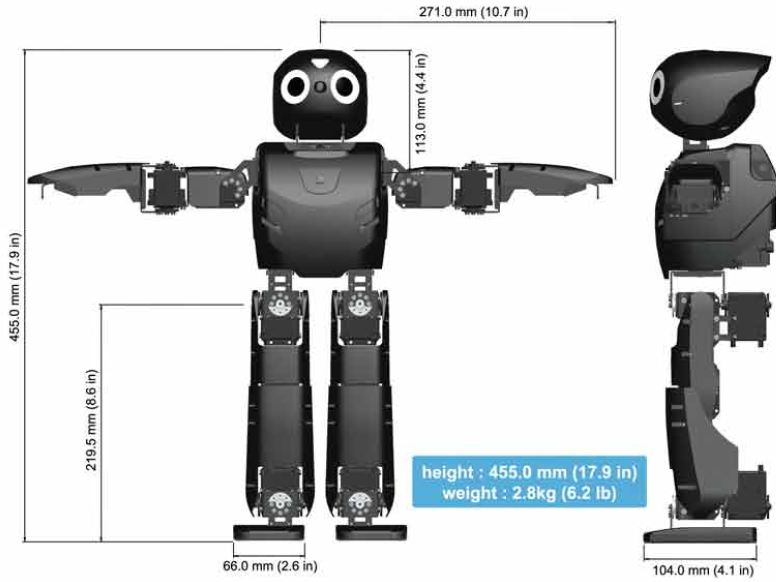
תנועת הרובוט מורכבת מ-20 מנועים: 6 בכל רגל, 3 בכל יד, ועוד 2 מנועים שמורכבים על ראש הרובוט.
מקבל הרובוט הוא 2.8 ק"ג וגובהו 45 ס"מ.
מהירות ההליכה של הרובוט מותאמת בזמן אמת ליציבות הרובוט, על מנת שנצליח לשמור על מהירות כמה שיותר גבוהה בכל רגע נתון של המשחק.
מנועים
המנועים בהם השתמשנו הם מנועי
RX-28M.
כל מנוע שוקל 72 גרם, ויכול לתת חיווי על מיקומו, טמפרטורה, מתח וכו'.
כל המנועים מחוברים לבקר (Controller), ודרכו ניתן לשלוט בכל אחד מהם.

חיישנים
הרובוט מצוייד בחיישן Gyroscope בעל 3 צירים וחיישן Accelerometer בעל 3 צירים. השימוש הגדול בחיישנים נעשה על מנת לזהות האם הרובוט נפל בזמן המשחק. אם אכן זיהינו שהרובוט נפל - מופעלת תנועה אוטומטית של קימה (Stand up) וכך הרובוט חוזר ליציבה ההתחלית שלו.
מצלמה
הרובוט מצוייד במצלמת 2MP של LG, בעלת רזולוציה של 640x480.
בקר
כפי שצויין קודם, הרובוט מצוייד בבקר (Controller) השולט על המנועים.
הבקר הוא מסוג
CM-730, עובד במהירות 730MHz ומחובר למחשב באמצעות חיבור USB.
מחשב
המחשב שעל הרובוט הוא מחשב מסוג
fit-PC2, בעל מעבד 1.6GHz וזכרון פנימי בנפח 1GB.
